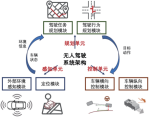
隨著駕駛安全性需求的不斷增加以及智能自動化技術的不斷發展,無人駕駛相關產業受到越來越多的關注。環境信息的感知及處理作為無人駕駛的關鍵信息輸入影響著車輛后續軌跡預測、路徑規劃以及運動控制等駕駛任務,是決定駕駛安全性及有效性的重要一環。本文介紹了環境信息處理在無人駕駛技術中的發展及應用,并且進一步探討了未來無人駕駛技術中環境信息應用的可能發展方向。
文章從可信接入的系統架構出發,分析了邊緣設備層的安全接入對系統安全性的影響,從而提出了針對工業可信接入的邊緣側可信網關的研究和開發,從可信網關的硬件、軟件和上位機等方面進行設計,并針對可信系統中的安全識別技術進行研究分析,以實現對待保護網絡的安全防護,達到工廠內網的信息安全隔離,實現可信的工業通信系統。
到第 頁
友情鏈接
電話:010-62669087 控制網版權所有未經許可不得轉載
地址:北京市海淀區上地十街輝煌國際5號樓1416室(100085)
版權所有 控制網 京ICP備14036844-2號 北京市公安局海淀分局備案號:11010802023656號




 名家名篇
名家名篇 北京市公安局海淀分局備案號:11010802023656號
北京市公安局海淀分局備案號:11010802023656號

 官方微信
官方微信